Research Overview

Foundations of Robotics
Research in the foundational concepts of robotics and automation covers an interdisciplinary range of topics. Computational methodologies, electronics engineering, and physics are all foundational areas of robotics research. Sub-topics include simulation, kinematics, control, optimization, and probabilistic inference.

Field & Service Robotics
Field robots are mobile robots that operate in dynamic environments. These robots are adaptive, and responsive working in variable conditions and territories. Service Robots are fully or partially autonomous and perform tasks that are dangerous, repetitive, or hazardous. This research area also comprises simple and complex industrial robots as well as frontline service robots.

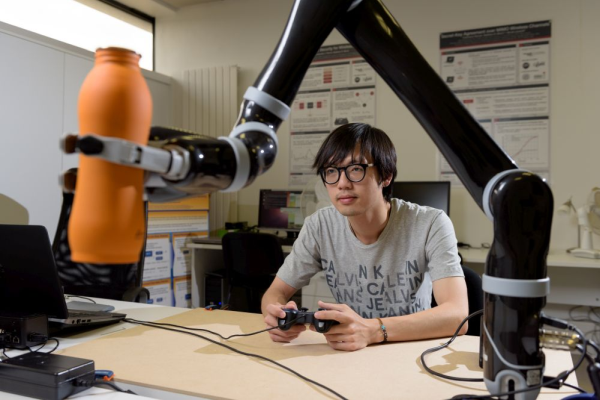
Human-Centered Robotics
Human-centered robotics focuses on robots that interact, assist and cooperate with humans requiring robot operation in human environments and close interaction with non-professional users. The research spans broad areas in human-robot interaction including; assistive and rehabilitation robotics, robotic systems design, wearable robotics, biomedical, surgical and clinical robots.

Manipulation & Locomotion
Robotic manipulation addresses the frameworks of modeling, motion planning, and control of grasp and manipulation of an object for a task. Manipulation research deals not only with the way in which the robot performs, but also the numerous operator-robot interface options. Once a task is defined, robots must be able to navigate its environment successfully. Legged, wheeled, articulated and winged are just a few of the way in robots are constructed for their specific tasks. Many of IRIM’s faculty are working to advance robotic locomotion, creating multi-environment capable robots and bespoke design options.
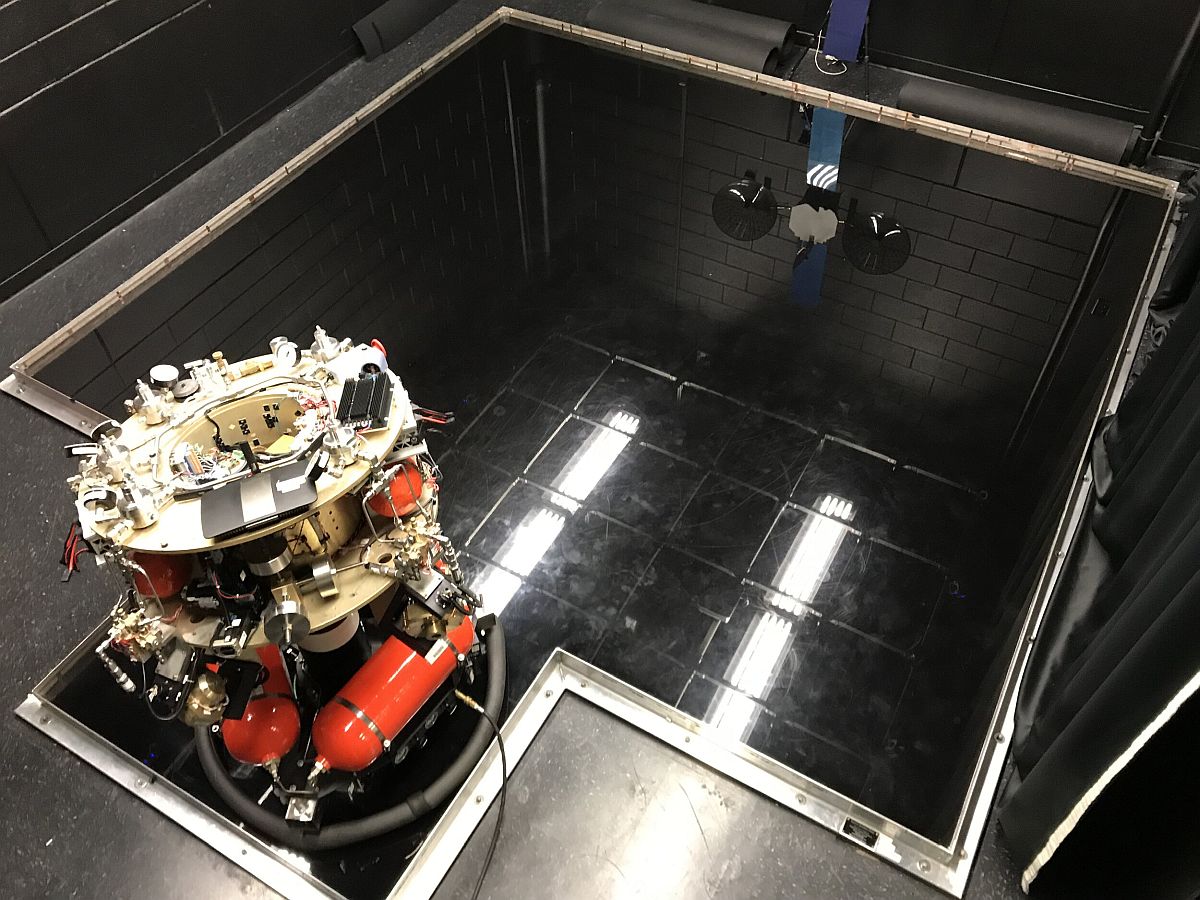
Safe, Secure, & Resilient Autonomy
Robots given a high degree of autonomy require formal assurances on their abilities and resiliency in the face of disruptions and uncertainty. Obtaining these assurances requires innovations across an interdisciplinary range of topics including control theory, machine learning, optimization, and formal methods for designing cyber-physical intelligent machines. By establishing a rigorous mathematical foundation of guaranteed performance, robots can be confidently deployed in safety-critical settings---for example, alongside humans---or for long durations without operator input such as underwater or in space.
Sensing & Perception
Robotic perception is related to many applications in robotics where sensory data and artificial intelligence/machine learning (AI/ML) techniques are involved. Examples include; object detection, environment representation, scene understanding, human/pedestrian detection, activity recognition, semantic place classification, and object modeling.
IRIM in 1 Minute
View Video Transcript
Institute for Robotics and Intelligent Machines (IRIM) at Georgia Tech
Video Summary: The Institute for Robotics and Intelligent Machines (IRIM) serves as Georgia Tech’s interdisciplinary hub for robotics research and education. The institute brings together researchers, students, and educators from across campus to advance robotics technologies that improve lives and address societal challenges. Featured areas of research include swarm robotics, drone technologies, exoskeletons, prosthetics, and rehabilitation robotics.
IRIM provides the organizational structure for robotics research and education at Georgia Tech, fostering collaboration across disciplines while supporting innovative technologies that enhance human capabilities, expand access to robotics education, and improve the human condition.
Speakers: Seth Hutchinson, Former Executive Director, Institute for Robotics and Intelligent Machines; Christopher Banks, Ph.D. Student, Georgia Tech; and Kinsey Herrin, Section Clinical Research Scientist, Georgia Tech.
Seth Hutchinson, Former Executive Director, Institute for Robotics and Intelligent Machines: IRIM is the Institute for Robotics and Intelligent Machines here at Georgia Tech. It's an interdisciplinary research institute; it's essentially the organizing structure for the research and education in robotics here at Georgia Tech.
Christopher Banks, Ph.D. Student, Georgia Tech: One of the coolest things about working here is that I work on drones. We're leveling the playing field for users by giving them access to the swarm robotics testbed.
Christopher Banks, Ph.D. Student, Georgia Tech: In addition to this, we're allowing younger students to be introduced to robotics at an earlier age.
Kinsey Herrin, Section Clinical Research Scientist, Georgia Tech: The EPIC lab at Georgia Tech stands for the Exoskeleton and Prosthetic Intelligent Controls lab, and our interest is really in the design, development, and testing of exoskeleton devices, prosthetic devices, and rehab robotics from the ground up.
Seth Hutchinson, Former Executive Director, Institute for Robotics and Intelligent Machines: And I think that's the big goal of all of the people that are involved in our work here in robotics research and education at Georgia Tech is to really try to improve the human condition and make the world a better place.




