IRIM Spotlight
 IRIM Executive Director Search
IRIM Executive Director Search
The Georgia Institute of Technology’s Office of the Vice President for Interdisciplinary Research (VPIR) is pleased to announce the initiation of the search for the next executive director of the Institute for Robotics and Intelligent Machines (IRIM).
(text and background only visible when logged in)
(text and background only visible when logged in)
IRIM Overview

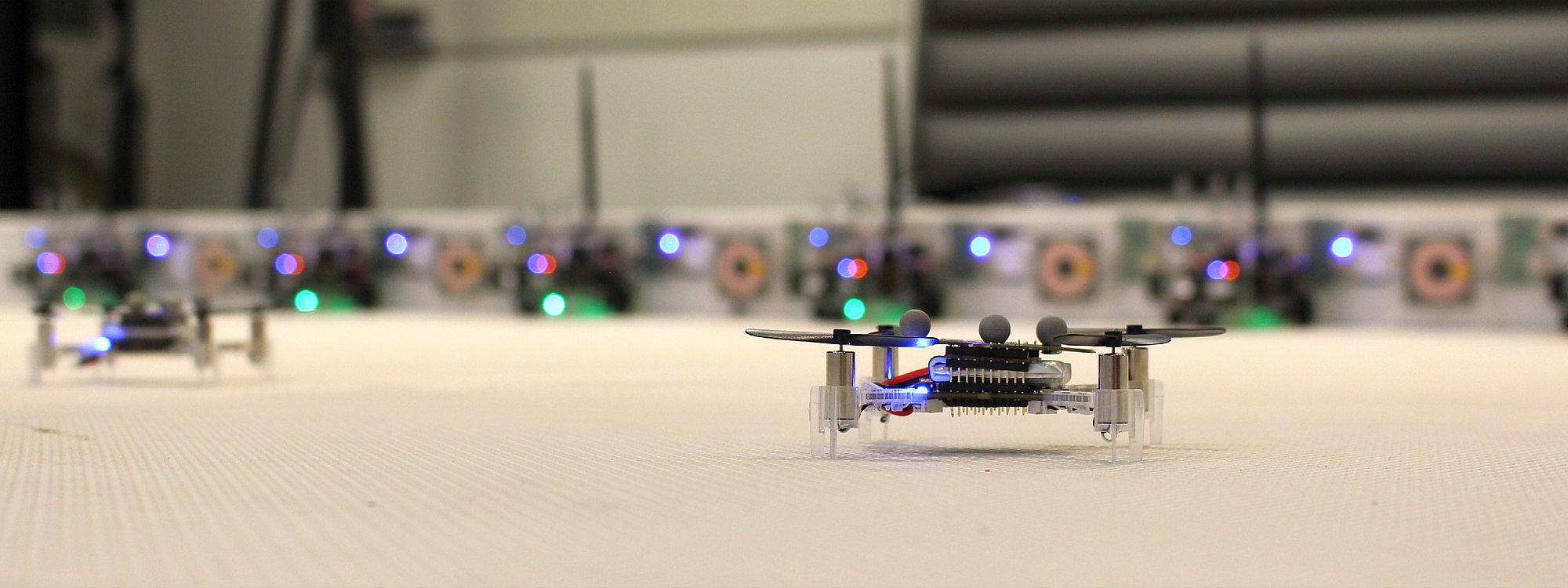
Robotics Research
The depth and breadth of IRIM breaks through disciplinary boundaries and allows for transformative research that transitions from theory to robustly deployed systems featuring next-generation robots. Fundamental research includes expertise in mechanics, control, perception, artificial intelligence and cognition, interaction, and systems.

IRIM & Outreach
The Institute for Robotics & Intelligent Machines (IRIM) participates in numerous K-12 STEM and community outreach activities related to robotics. Additionally, IRIM hosts tours throughout the year, and our student group, RoboGrads, participates in activities to raise awareness of the importance of robotics technology and stimulate interest in the field

Robotics Education
Georgia Tech offers an interdisciplinary path to an M.S. and Ph.D. in Robotics to students enrolled in a participating school within either the Colleges of Computing or Engineering. A fully integrated, multidisciplinary experience, the M.S. & Ph.D. programs include both coursework and research with faculty members in various units across campus.

IRIM & Industry
Our Industry Program allows partners to explore opportunities for research collaboration, facilities and services, consulting, student hiring, and other interactions. Whether you join as a strategic partner, an affiliate, or as a member of one of our customized consortia, your team will be supported through our work as a interdisciplinary group of robotics leaders.
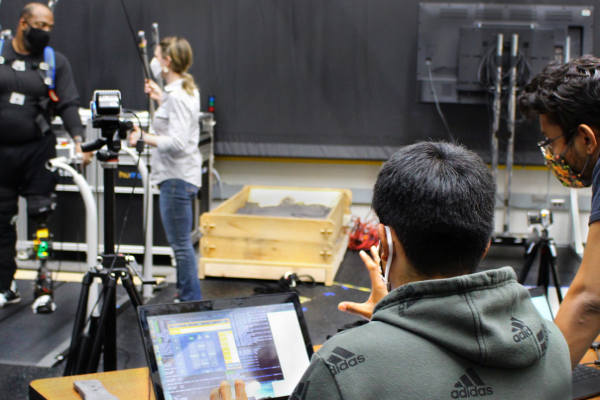
Core Research Facilities
The Institute for Robotics and Intelligent Machines at Georgia Tech supports and facilitates the operation of several core research facilities on campus allowing our faculty, students and collaborators to advance the boundaries of robotics research.
(text and background only visible when logged in)




