Foundations of Robotics
IRIM’s Foundations of Robotics Research and Education themes include broad interdisciplinary areas that prepare students to engage in specialty field robotics courses with a solid grounding in the below topics as they progress in their degree program

Control Systems
Design of control inputs that will produce desired behavior of dynamical systems, including manipulators, wheeled mobile robots, and underactuated systems. Methods include mathematical analysis as well as numerical, optimization-based approaches. Key concepts include use of feedback, system stability, optimality, adaptivity, and robustness.
Dynamics
Study of the mechanical forces and accelerations resultant from them as applied to rigid-body systems (e.g., aerial and submersible robots) multi-body systems (e.g., manipulators and legged robots), and flexible devices (e.g., continuum and soft robots). Topics of concentration include forward and inverse dynamics, as well as estimation of motion and inertial parameters.
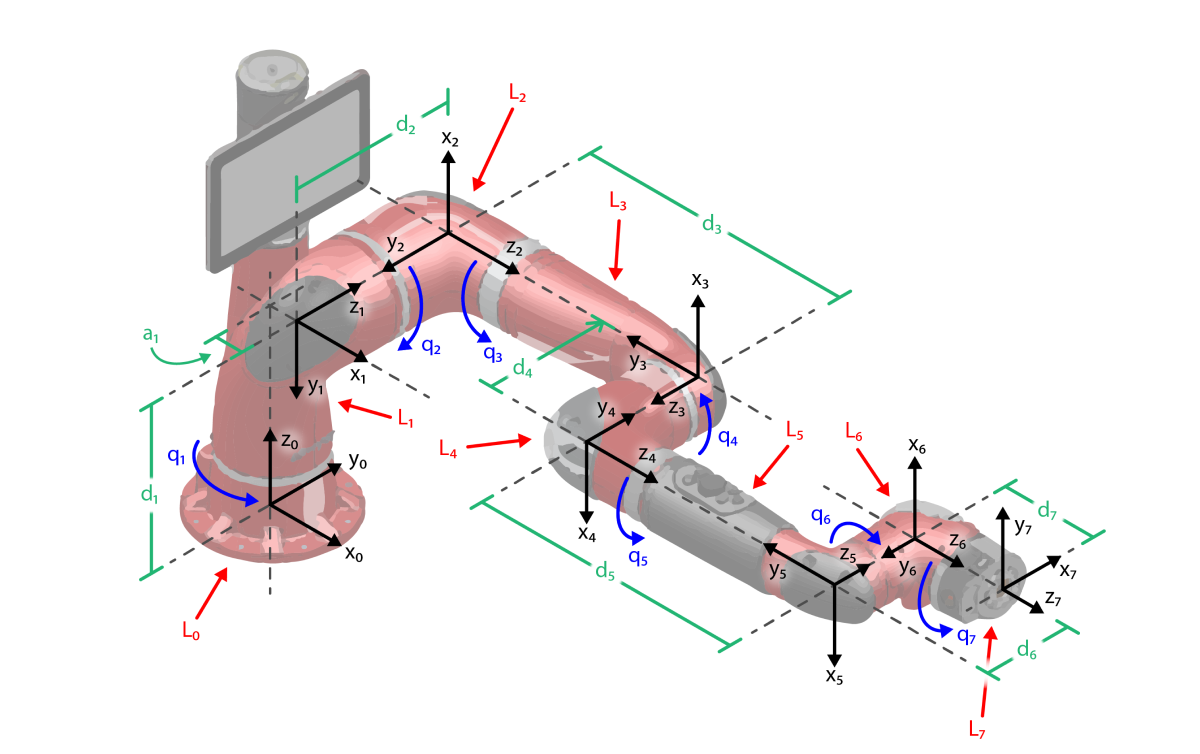
Kinematics
Emphasizes geometric and non-linear equations describing the degree and range of motion in robotic systems. Foundational for the further study of motion planning, dynamic systems for robotic applications in biomechanics, wheeled mobile robots, and systems requiring hyper-redundancy in design.
Manipulation
This area builds on kinematics, dynamics, and motion planning to enable a robot to physically interact with objects in its environment. For robots to successfully grasp and move objects, both durable and fragile, they must act with the proper directional movement and application of force. Foundational areas in this subject include kinematics of prehension, contact modeling, tactile sensing, and grasp planning.

Motion Planning
Planning a robotic system’s movement within its physical space to satisfy performance goals while honoring geometric and dynamic constraints. Problems include collision avoidance and trajectory optimization, and applications range from path planning in manufacturing cells to trajectory generation for legged locomotion or aerial maneuvering.
Navigation
Fundamental introduction to the way robots and robotic systems learn their environment, estimate their position within the environment and move purposefully within the environment. Robot navigation in dynamic or uncertain environments, vision systems and obstacle avoidance for autonomous applications, and navigation in multi-agent scenarios are topics within this theme.
Probability & Statistics
Application of theoretical and mathematically based methods to characterize and reason about uncertainty in robotic systems. Foundational for probabilistic inference, Bayesian reasoning, policy optimization for uncertain systems, and perception. Provides the underlying theory for methods in data analysis and machine learning.

Robot Structures
Lorem ipsum dolor sit amet, consectetur adipiscing elit. Proin quis convallis leo. Mauris sed lacus vel nisi condimentum vehicula sed sit amet erat. Sed euismod, est sit amet tincidunt vulputate, sapien orci mattis nibh, et sagittis orci ex vel eros. Vestibulum venenatis odio a finibus congue.




