IRIM Impact Report | 2022-2023
A Message From The Director
 Robotics has the potential to mitigate future labor shortages and drive economic growth, to supplement the efforts of caregivers for an aging population, to provide physical assistance to those with disabilities, and to actively engage those with cognitive to enhance learning, reasoning, and performing typical activities of daily living. In The Institute for Robotics and Intelligent Machines (IRIM) at the Georgia Institute of Technology we perform the fundamental research that will enable all of this and more.
Robotics has the potential to mitigate future labor shortages and drive economic growth, to supplement the efforts of caregivers for an aging population, to provide physical assistance to those with disabilities, and to actively engage those with cognitive to enhance learning, reasoning, and performing typical activities of daily living. In The Institute for Robotics and Intelligent Machines (IRIM) at the Georgia Institute of Technology we perform the fundamental research that will enable all of this and more.
Since its creation in 2013, IRIM has been the focal point of robotics research on the Georgia Tech campus. With more than forty core faculty members and more than two hundred graduate students, IRIM's research portfolio ranges from the theoretical to the applied, from actuation to intelligence, with application areas such as human-robot interaction, medical robotics, human augmentation and prosthetics, autonomous vehicles, locomotion, and factory automation. IRIM is recognized as one of the world's leading interdisciplinary robotics institutes, and its faculty are among the world leaders in the robotics research community.
In this year's annual report, you will find updates about our research activities, including major research centers and facilities, our seed grant program, and the newest members of our faculty. In addition, the report includes an overview of our educational programs, and information about our newly launched Industry Partners Program.
It has been a good year for GT Robotics, and I hope you enjoy reading about what we've been up to.
Sincerely,
Seth Hutchinson
Executive Director, Institute for Robotics and Intelligent Machines
Professor and KUKA Chair for Robotics, School of Interactive Computing
Georgia Institute of Technology

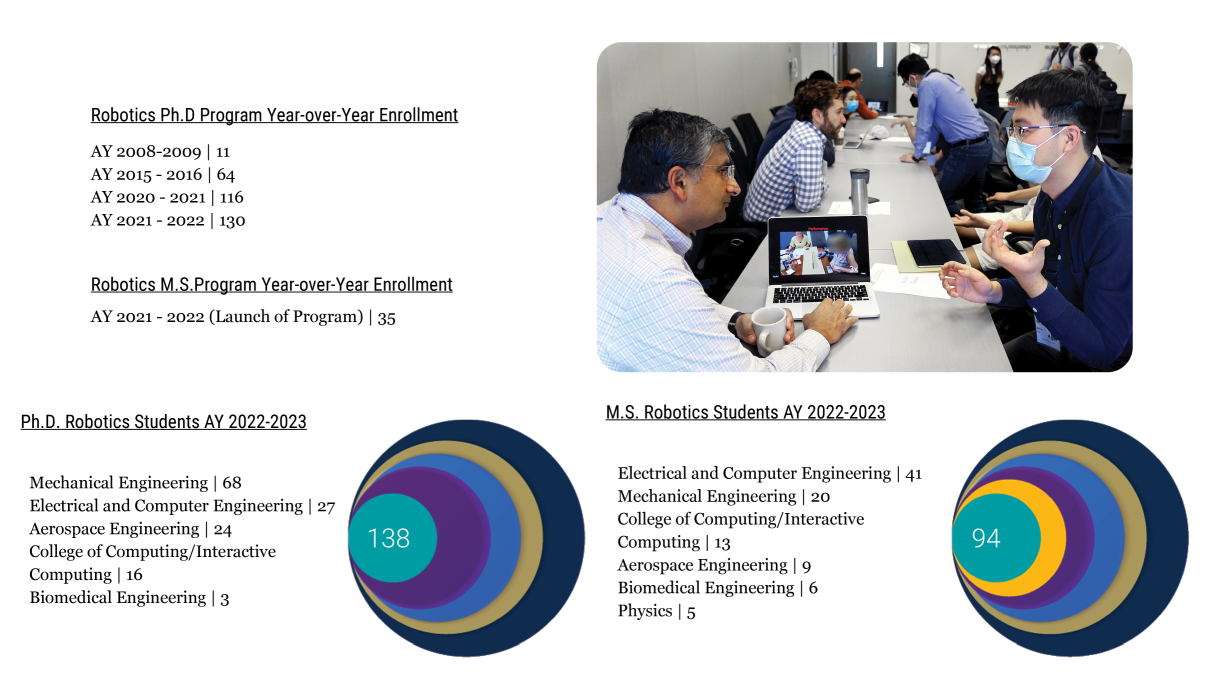
Robotics Students by the Numbers
Research Highlights
Microrobots Controlled by Vibrations Could Be a Boon for Research
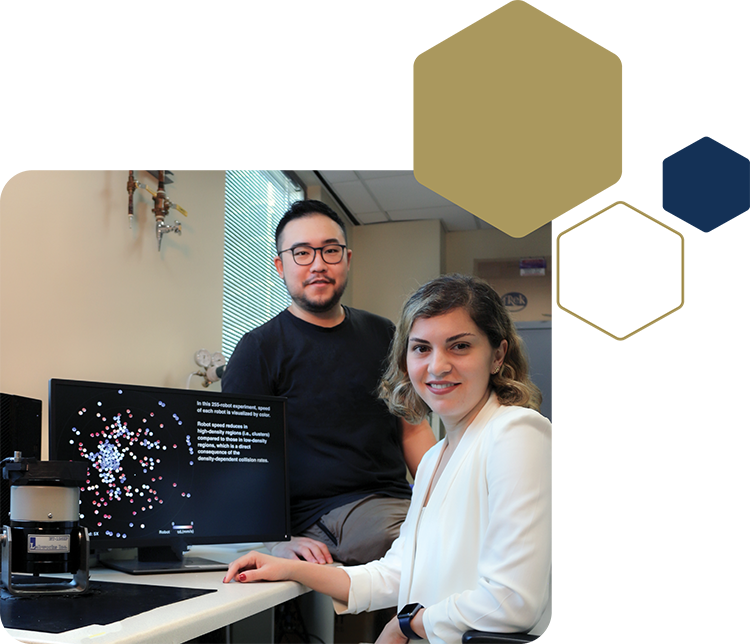 Regardless of their potential, the size of the microrobots mostly means they have restricted sensing, motility, communication, and computation abilities, but a new study from the Georgia Institute of Technology improves their ability to cooperate in an efficient manner. The study provides a new system to regulate the ability of swarms of 300 3-mm microbristle robots (microbots) to combine and scatter controllably without the need for onboard sensing.
Regardless of their potential, the size of the microrobots mostly means they have restricted sensing, motility, communication, and computation abilities, but a new study from the Georgia Institute of Technology improves their ability to cooperate in an efficient manner. The study provides a new system to regulate the ability of swarms of 300 3-mm microbristle robots (microbots) to combine and scatter controllably without the need for onboard sensing.
The innovation is exclusive to Georgia Tech’s capability in electric and computer engineering (ECE) and robotics and its zeal for interdisciplinary partnerships.
While larger robots can regulate movement by sensing the surroundings and wirelessly transmitting this data to each other, microbots do not have the capacity and cannot carry the same power units, sensors, or communications. In this research, the team instead employed inter-robot physical interactions to prompt robots to swarm.


Robotics Professor Seeks to Revolutionize Heart Surgery
Gombolay received the prestigious National Institutes of Health RO1 grant, which will fund a three-year study of how robotics can improve and minimize the risks of open-heart surgery. Gombolay has partnered with Roger Dias, assistant professor of emergency medicine at Harvard Medical School, and Marco Zenati, professor of surgery at Harvard Medical School and chief of cardiothoracic surgery for the U.S. Department of Veterans Affairs to conduct the study.

To Build a Better Crawly Robot, Add Legs — Lots of Legs
When traveling on rough and unpredictable roads, the more legs the better—at least for robots. Balancing on two legs is somewhat hard; on four legs, it’s slightly easier. But what if you had many many legs, like a centipede? Researchers at Georgia Institute of Technology have found that by giving a robot multiple, connected legs, it allows the machine to easily clamber over landscapes with cracks, hills, and uneven surfaces without the need for extensive sensor systems that would otherwise have helped it navigate its environment.
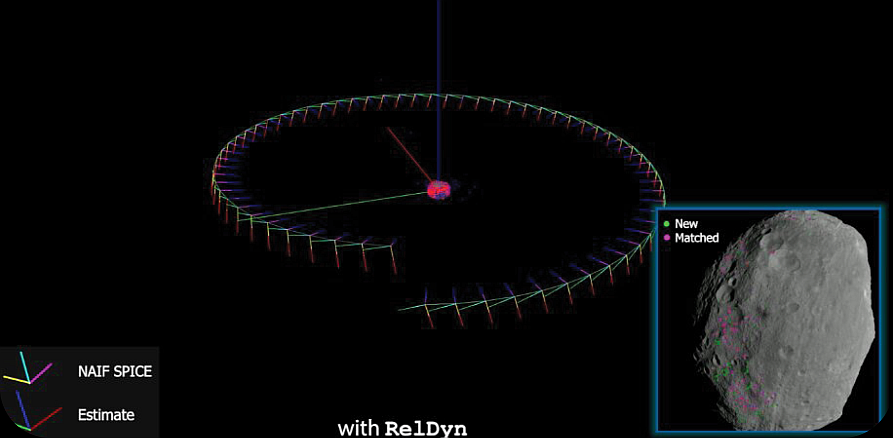
A Model to Enable the Autonomous Navigation of Spacecraft During Deep-space Missions
Simultaneous localization and mapping (SLAM) is a promising technology that can be used to improve the navigation of autonomous systems, helping them to map their surrounding environment and track other objects within it. So far, it has primarily been applied to terrestrial vehicles and mobile robots, yet it could also potentially be expanded to spacecraft.
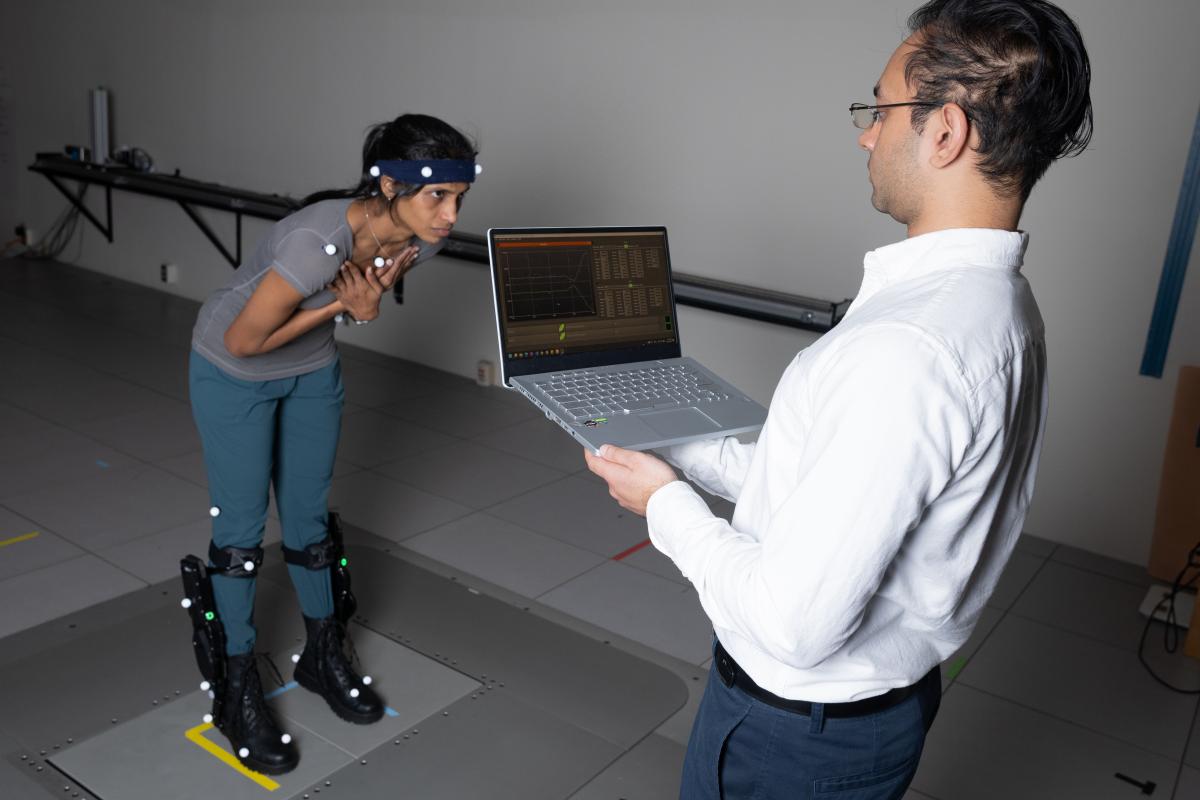
Faster-than-reflexes Robo-boots Boost Balance
Robotic boots providing superhuman reflexes can help your balance. Our new study shows that the key to augmenting balance is to have boots that can act faster than human reaction times.
When people slip or trip, their reactions to regain balance are far slower than some machines can act. For humans, and other animals with legs, it takes time for biological sensors to send signals to the nervous system and then turn on muscles. Robots can act much faster, using wires instead of nerves to send their signals.

Researchers Use Novel Approach to Teach Robot to Navigate Over Obstacles
Wh en it comes to robotic locomotion and navigation, Naoki Yokoyama says most four-legged robots are trained to regain their footing if an obstacle causes them to stumble. Working toward a larger effort to develop a housekeeping robot, Yokoyama and his collaborators—Simar Kareer and Joanne Truong—set out to train their robot to walk over clutter it might encounter in a home.
en it comes to robotic locomotion and navigation, Naoki Yokoyama says most four-legged robots are trained to regain their footing if an obstacle causes them to stumble. Working toward a larger effort to develop a housekeeping robot, Yokoyama and his collaborators—Simar Kareer and Joanne Truong—set out to train their robot to walk over clutter it might encounter in a home.
“The main motivation of the project is getting low-level control over the legs of the robot that also incorporates visual input,” said Yokoyama, a Ph.D. student within the School of Electrical and Computer Engineering. “We envisioned a controller that could be deployed in an indoor setting with a lot of clutter, such as shoes or toys on the ground of a messy home. Whereas blind locomotive controllers tend to be more reactive—if they step on something, they’ll make sure they don’t fall over—we wanted ours to use visual input to avoid stepping on the obstacle altogether.”
IRIM Project Portfolio
 The AI Institute for Collaborative Assistance and Responsive Interaction for Networked Groups (AI-CARING) is a National Artificial Intelligence (AI) Research Institute funded by the National Science Foundation. The AI-CARING mission is to develop the next generation of personalized collaborative AI systems that improve the quality of life and independence of aging adults living at home.
The AI Institute for Collaborative Assistance and Responsive Interaction for Networked Groups (AI-CARING) is a National Artificial Intelligence (AI) Research Institute funded by the National Science Foundation. The AI-CARING mission is to develop the next generation of personalized collaborative AI systems that improve the quality of life and independence of aging adults living at home.
The Distributed and Collaborative Intelligent Systems and Technology Collaborative Research Alliance (DCIST-CRA) will create Autonomous, Resilient, Cognitive, Heterogeneous Swarms that can enable humans to participate in a wide range of missions in dynamically changing, harsh, and contested environments. These include search and rescue of hostages, information gathering after terrorist attacks or natural disasters, and humanitarian missions.
GTRI | Aerospace, Transportation & Advanced Systems Laboratory

The Georgia Tech Research Institute’s (GTRI) Aerospace, Transportation and Advanced Systems (ATAS) Laboratory conducts robotics and systems design research for Department of Defense (DOD) and manufacturing/agriculture domains. ATAS’s DOD-focused mission is a preeminent leader in innovative and advanced research for fielded unmanned systems, providing both single and multi-agent solutions, spanning from basic research to advanced prototypes and test and evaluation. The laboratory’s work specializes in applying concepts well established in the robotics domain to address applications unique to the DOD. For manufacturing/agriculture domains, ATAS performs cutting-edge research to make robotic systems (articulated arms to mobile platforms) more agile, flexible, and adaptable to allow them to work in unstructured environments. Sample projects include automating harvesting of specialty crops, automating deboning of poultry, and using large language models (LLMs) for task planning in assembly operations. In both domains, IRIM fosters collaboration by bringing together Georgia Tech faculty members and GTRI researchers to integrate the latest research advances into systems that are field tested for our sponsors.
Seeded Projects
IRIM's Seed Grant Program supports high-risk, high-reward research. Seed grants provide ground-level funding for multi-faculty teams to pursue next-generation robotics research with strong market translation possibilities and the promise to provide rapidimpacts on local, regional, and global issues. The following projects have received IRIM Seed Grant funding in the past year:
Co-adaptive Human-Humanoid Collaboration through Multi-modal Wearable Sensing and Human Collaborative Dynamics Reasoning
FarmHand: a Robotic Manipulator for Indoor Farming
Large Language Model Based Planning for Autonomous Assembly and Repair
Continuum Robotics for Autonomous Space Servicing
Human Animal-Robot Interaction System (HARIS) for Autistic Children
Development and Evaluation of a Virtual Reality Environment for Robot Learning from Human Demonstration
Integration of Haptic Feedback in Virtual Reality Environments Using a WAM Robot Arm (VRWAM)
Teaching Robots New Concepts through Conversation
Diffusion Models for Interpretable Robot Task Planning
Faculty Updates
Yue Chen Receives NIH Grant to Research Robotic Platform for Treating Atrial Fibrillation
To address issues in AF treatment Yue Chen, Assistant Professor at the Department of Biomedical Engineering at Georgia Tech & Emory and team will use this new award to develop an MR-tracked catheterization toolset with an MR-enabled intraoperative navigation feedback framework and robotic hardware system. Their innovative approach is the first to integrate accurate catheter manipulation and CTCF feedback with MRI-based monitoring and lesion assessment to provide a unified system for AF ablation planning, treatment, and assessment.
 Gregory Sawicki Honored for Human-Centered Robotics Research
Gregory Sawicki Honored for Human-Centered Robotics Research
Gregory S. Sawicki, Associate Professor in the School of Mechanical Engineering and the School of Biological Sciences, was named the Recipient of the 2023 American Society of Biomechanics Founders’ Award for his biomechanics-based robotics research. The Founders’ Award was established in 2017 to recognize scientific accomplishment in biomechanics and excellence in mentoring and is open to investigators of all disciplines within ASB.
Ye Zhao Wins NSF CAREER Award for “Interactive Decision-making and Resilient Planning for Safe Legged Locomotion and Navigation”
Dr. Ye Zhao, Assistant Professor at the George Woodruff School of Mechanical Engineering, Director of the Laboratory for Intelligent Decision and Autonomous Robots (LIDAR) and member of the Institute for Robotics and Intelligent Machines, has been granted an NSF CAREER Award of ~$595,000.00 over a period of 5 years. Ye and his team will use the funding to develop a novel task and motion planning framework for bipedal robotic locomotion interacting with complex environments.
New Faculty
- Alex Abramson | Assistant Professor, School of Chemical and Biomolecular Engineering
- Alexander Adams | Assistant Professor, College of Computing
- Shreyas Kousik | Assistant Professor, George W. Woodruff School of Mechanical Engineering
- Alexis Noel | Research Engineer II; Aerospace, Transportation & Advanced Systems Laboratory @ GTRI
- Omobolanle Ogunseiju | Assistant Professor, School of Building Construction
- Lonnie Parker | Collaborative Autonomy Branch Chief, ATAS Lab @ GTRI

Events & Outreach
 Regularly Scheduled IRIM Events
Regularly Scheduled IRIM Events
Fall Robotics Research Symposium
ICRA Writer’s Workshop
Robotics Seminar Series | ~12 annually
IRIM + Industry Robotics Meet-Up Nights
IRIM Robotics Days for Industry (RD4I)
National Robotics Week | Education Outreach
The Atlanta Science Festival | Educational Outreach
Spring Research Showcase
Ph.D. Applicant Recruiting Week
Annual GT @ ICRA Robotics Party
2022 - 2023 Outreach & Event Highlights
 HAC and LIDAR Lab host a visit from State Congressional Representatives
HAC and LIDAR Lab host a visit from State Congressional Representatives
EPIC and PoWeR Labs host APS Biomechanics Day
2022 Atlanta Science Festival Georgia Tech Science and Engineering Day
2023 Conference on Robot Learning (CoRL)
International Symposium on Medical Robotics
Graffiti Bot @ AVANT South






